Use APKPure App
Get RTAB-Map old version APK for Android
Real-Time Mapping Aspect-Based
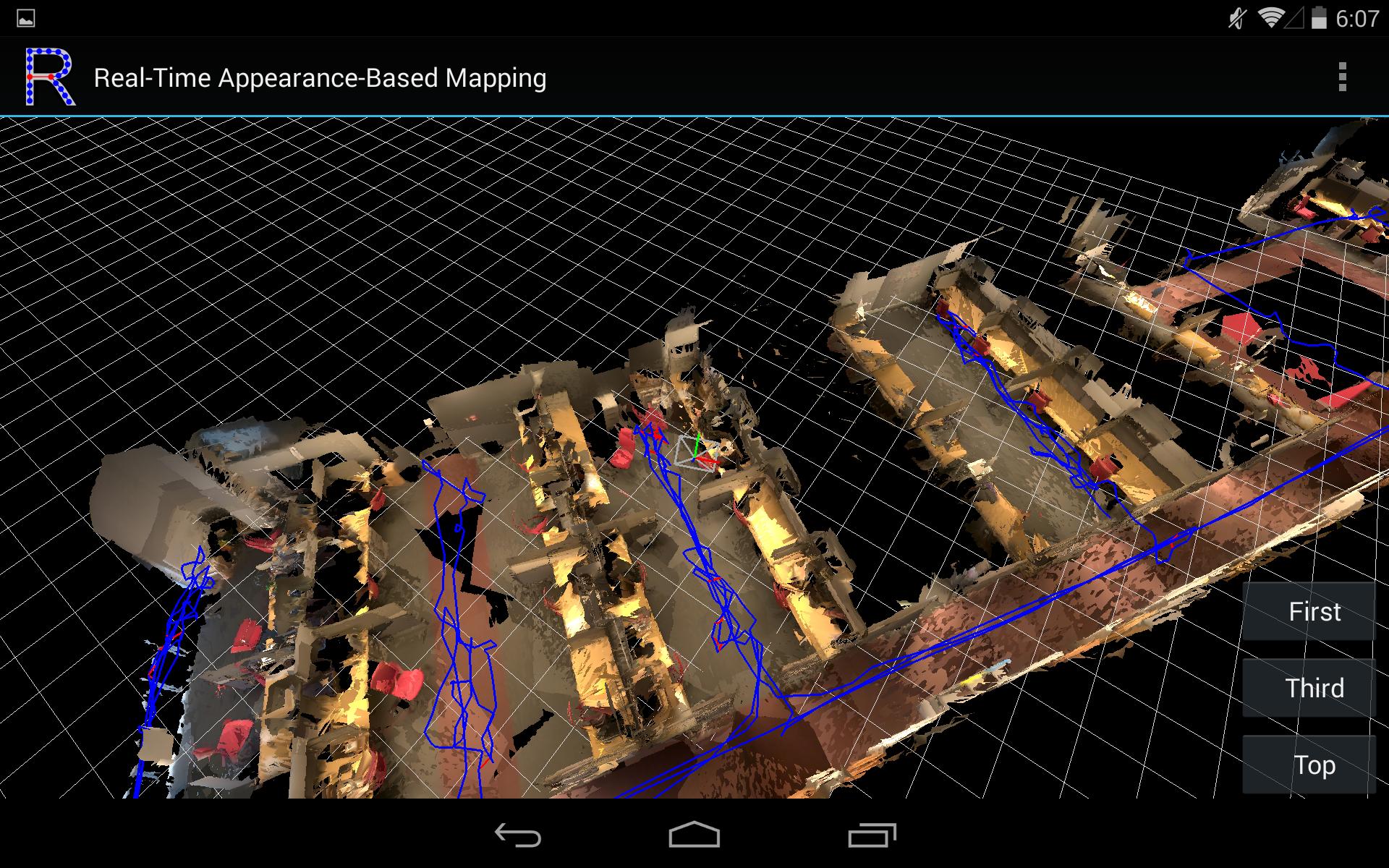
RTAB-Carte (en temps réel basé sur les cartographies Apparence-) est une approche SLAM-Based Open Graph Source RVB-D basé sur un détecteur de fermeture de boucle à base apparence incrémentale. Le détecteur de fermeture de boucle utilise une approche sac de mots à la probabilité d'une durée déterminée d'une nouvelle image provient d'un emplacement précédent ou un nouvel emplacement. Quand une hypothèse de fermeture de la boucle est acceptée, une nouvelle contrainte est ajoutée au graphique de la carte, puis un optimiseur graphique minimise les erreurs sur la carte. Une approche de gestion de la mémoire est utilisée pour limiter le nombre d'emplacements utilisés pour la détection et l'optimisation graphique fermeture de boucle, de sorte que les contraintes en temps réel sur grande échelle Environnements sont toujours respectés.
Modèle de la vidéo présenté sur sketchfab ici: https://skfb.ly/6nryX
Pour toute question, poser sur le forum ou sur Github: http://introlab.github.io/rtabmap/#troubleshooting
*** Il ne fonctionne que sur le projet Tango
Caractéristiques:
* Numérisation 3D en ligne / cartographie de l'environnement
* Détection et la correction carte de fermeture de boucle en ligne
* Enregistrer au format DB (RTAB-Carte format de bureau)
* Exporter en PLI ou OBJ (avec des textures jusqu'à 720p)
* Cartographie multi-session (sauvegarde et continuer plus tard)
* Mode de localisation uniquement (dans une session précédente)
* Mode Trajectoire où les nuages de points ne sont pas enregistrés (semblable à la zone d'apprentissage)
* Les options de post-traitement (par exemple, utiliser Bundle pour aligner les textures d'ajustement)
* Ajout « Paramètres-> Mapping-> Enregistrer GPS option » (désactivé par défaut) pour enregistrer les coordonnées GPS dans la base de données. Voir le numéro # 226 sur la page de projet pour plus d'informations.
Last updated on Nov 24, 2016
- Added "Mapping->Append Mode" option (default true): when resuming, a new map is created only after being localized with the old map.
- Updated with RTAB-Map 0.11.11 and Tango Yildun.
- In third-person view, we can now move virtually the camera with two fingers.
- Added Data Recorder Mode under Mapping options. This can be used to record Tango raw data at higher frame rate without actual mapping.
- Added smoothing mesh post-processing option
Dernière version
![]() 0.11.11
0.11.11
Telechargé par
Melissa Smith
Nécessite Android
Android 4.2+
Available on
![]()
Catégories
Signaler


Discover what you want easier, faster and safer.

RTAB-Map
0.11.11 by Mathieu Labbé
Oct 24, 2018